Радиолокационные методы определения кинематических характеристик железнодорожного подвижного состава
Аннотация
Работа посвящена созданию методик позиционирования подвижного состава на основе обработки радиолокационных данных верхнего строения железнодорожного пути. Радиолокационные данные (радарограмма) отражают периодическую структуру рельсошпальной решетки, позволяющую определить количество пройденных шпал в процессе движения. Методики основаны на прямом вычислении числа экстремумов в радарограмме или по особенностям спектра фурье-преобразовании радарограммы.
Ключевые слова: Радиолокация, радарограмма, верхнее строение пути, фурье-преобразование, позиционирование.
Определение кинематических характеристик железнодорожного подвижного состава позволяет решать целый ряд технических задач, включающих оптимальное управление процессом перевозок, создание систем автоведения поездов, технического обслуживания верхнего строения пути, локализации дефектов балластного слоя и земляного полотна при диагностике пути в скоростном режиме. Эта информация необходима для определения фактического пробега подвижного состава для оптимизации системы технического обслуживания и ремонта.
Как правило, работа систем позиционирования предполагает использование данных измерения угловой скорости колёсных пар, работу с фиксированными отрезками или метками, расположенными на пути. Достаточно широко применяются и радиотехнические измерители: доплеровские, корреляционные, радиотехнические измерители искусственных спутников Земли [1]. Разработка методов навигации с использованием спутниковых технологий для нужд железнодорожного транспорта появилась в середине 80-х годов прошлого века. В это время решалась задача определения координат скорости подвижного состава с погрешностью до 45 м и 1,6 км/ч соответственно [2].
В настоящее время технологии спутникового позиционирования находят все более широкое применение на железных дорогах развитых в техническом отношении стран [3]. В нашей стране соответствующие работы можно условно разделить на три группы. Часть исследований направлена на решение задач управления подвижным составом, часть – логистическому управлению доставкой грузов. Кроме этого, разрабатываются подходы к мониторингу рельсовой калии с использованием сетевого принципа дифференциального спутникового позиционирования в сочетании с бесконтактными инерциальными измерительными системами.
Развитие сети наземных информационных сетей, позволяющих реализовать принцип дифференциального позиционирования в ближайшем будущем позволит обеспечить практически повсеместно точность позиционирования до 0.010-.001 м. Исключения могут составлять гористые участки транспортных коммуникаций, протяженные туннели и регионы с искусственным подавлением спутниковой связи на выделенных для глобального позиционирования частотах радиодиапазона. Вмести с этим, необходимо отметить, что время, требуемое для реализации указанной точности измерений недопустимо велико при решении ряда задач динамики подвижного состава. При решении таких задач в настоящее время используются системы, получающие кинематическую информацию от колеса подвижного состава. Основным недостатком таких систем может служить пробуксовка колеса при торможениях и разгонах. Для преодоления этого недостатка в данной работе разрабатываются методы определения положения и скорости движения подвижного экипажа с использованием сигналов, вырабатываемых при его движении над периодической рельсошпальной решеткой. Очевидно, что такие методы должны быть бесконтактными и использовать сигналы электромагнитной природы.
Аппаратура и настройка радиолокационного оборудования.
Разработанные в данной работе методики позиционирования подвижного состава на рельсошпальной решетке и методики определения скорости движения подвижного состава базируются на радиолокации деревянных и железобетонных шпал и закрепленных на них конструкциях скрепления шпал и рельсов. В работе использованы импульсные локаторы с центральной частотой 1700 МГц. Передающая и приемная антенны размещены на подрессоренной части локоматива. Использованы рупорные конструкции, формирующие направленное электромагнитное излучение, позволяющие эффективно подавлять помехи от рельсов, металлических деталей конструкции и объектов инфраструктуры обустройства пути. Высота подвеса (H) выбрана равной 0,35 м. Выбор H обусловлен необходимостью получения в приемной антенне сигнала максимально возможной величины при соблюдении безопасностной эксплуатации антенного блока в процессе движения.
Информация от шпальной решетки (Fj(tn) j-ая трасса радиолокационного обследования, в момент времениtn от начала генерации) поступает в приемную антенну через время t после испускания зондирующего импульса электромагнитного излучения:![]() , (1)
, (1)
где c – скорость распространения электромагнитного излучения в воздухе, D – расстояние между геометрическими центрами передающей и приемной антенн используемого для измерений антенного блока. Для повышения быстродействия устройства необходимо разместить трассу во времени развертки таким образом, чтобы первые стробирующие усилитель импульсы приходили с задержкой t, определяемой формулой (1). Выбор длительности развертки во времени необходимо выполнить минимальным для детального описания особенностей конструкции верхнего строения пути, тогда число точек в трассе можно оценить соотношением:![]() , (2)
, (2)
где h- толщина шпалы, v – скорость распространения электромагнитного излучения в балласте, ε – диэлектрическая проницаемость балласта. Использование этой формулы дает оценку для N в интервале значений 25 – 30 точек.
Предварительная обработка результатов радиолокации
Антенны локатора, размещенные на подрисоренных узлах локоматива, испытывают при движении колебания с максимальными амплитудами до 0.10 – 0.15 м. Механические колебания отражаются на радарограммах, как показано на рисунке 1а. При построении этого рисунка выбран участок пути, содержащий стык (позиция Б), и скрепления разной конструкции (А и В). Для подавления колебаний подвеса разработан алгоритм и созданна программа для ЭВМ, в процессе выполнения которой определяются номера точек, относящиеся к границе балласта, которые затем размещаются вдоль горизонтали (рисунок 1 б).

Рис. 1. Колебания подвеса антенны (а) и подавление колебаний подвеса математическими методами (б)
Количественная характеристика радиолокационной трассы
Поставим в соответствие трассе радиолокационного обследования Fj(t) функцию отражательной способности верхнего строения железнодорожного пути: , (3)
, (3)
где t1 и t2 измеренные от начала генерации моменты времени начала и завершения регистрации трассы. Результаты расчета по формуле 3 приведены на рисунке 5. Видны периодические особенности, связанные с отражением электромагнитного излучения от железобетонных шпал и элементов скрепления.
Первая процедура подсчета числа пройденных шпал. Решение поставленной в работе задачи позиционирования подвижного состава на рельсошпальной решетке сводится к поиску и подсчету числа экстремумов выражения (3). Реализация процедуры поиска экстремумов не всегда может быть выполнена непосредственно. В некоторых случаях наблюдаются сбои численной процедуры, что связано с недостаточной контрастностью экстремумов, обусловленной тем, что при текущем содержании верхнее строение пути иногда находится в ненадлежащем техническом состоянии.
Для частичного преодоления этого фактора первоначально при поиске экстремумов функция (3) свернута сo сглаживающей функцией jj,i:![]() , (4)
, (4)
которая в данной работе выбрана в виде:![]() при j-i>N
при j-i>N ![]() при j-i
при j-i![]() N,
N,
где параметр N изменяется автоматически в процессе выполнения алгоритма таким образом, чтобы значение j-i не превышало одной четвертой числа трасс, приходящихся на период квазигармонической функции ![]() . Результаты приведены на рисунке 2.
. Результаты приведены на рисунке 2.
Оценим требуемую производительность радиолокационного оборудования, которую необходимо обеспечить для получения заданной точности определения положения шпалы.
Обозначим m – число трасс радиолокационного зондирования, генерируемое локатором в единицу времени, n – число трасс, необходимое для описания формы шпалы, v – скорость движения подвижного состава. Зная ширину шпалы (=0,2 м), можно предположить, что для качественного описания ее формы необходимо l трасс, а на метр пути - n=5l трасс. Тогда требуемая производительность радара может оцениваться соотношением:![]() . (5)
. (5)
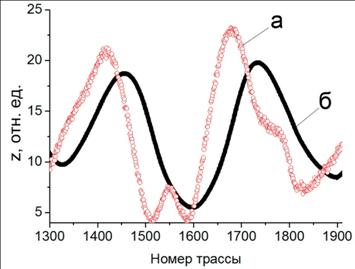
Рис. 2. отражательная способность верхнего строения пути:
а – расчет по формуле (3); б – расчет по формуле (4).
При скорости движений v=30 м/с и l=10 согласно (5) получаем m=1500 трасс/с. Производительность, близкую к этому значению при N=25-30, обеспечивают современные конструкции лакаторов отечественного и импортного производства.
Вторая процедура подсчета число пройденных шпал. Алгоритмы, построенные на выполнении прямого подсчета, оказываются чувствительными к достаточно большому числу внешних параметров, которые приходится подбирать при переходе к участкам пути, отличающимся качеством текущего содержания верхнего строения пути. В связи с этим в данной работе предложена методика обработки георадиолокационной информации, основанная на применении процедуры горизонтальной фильтрации. Смысл фильтрации заключается в применении к фрагменту радарограммы или его отражательной способности фурье преобразования и выделении частоты спетра (![]() ), характеризующей скорость движения подвижной единицы над рельсошпальной решеткой рисунок (4). Формирование оконной функции (участок спектра вокруг
), характеризующей скорость движения подвижной единицы над рельсошпальной решеткой рисунок (4). Формирование оконной функции (участок спектра вокруг ![]() ) и восстановлении исходного фрагмента с ее использованием, позволяет перейти к линейчатой структуре радарограммы верхнего строения пути.
) и восстановлении исходного фрагмента с ее использованием, позволяет перейти к линейчатой структуре радарограммы верхнего строения пути.
На рис. 3 приведен спектр радарограммы, полученной при скорости движения, близкой к 10 м/сек. Вертикальными линиями отмечен фрагмент спектра, учтенный при построении оконной функции. Также приведены результаты фильтрации, отражательная способность и результаты подсчета пройденных шпал.
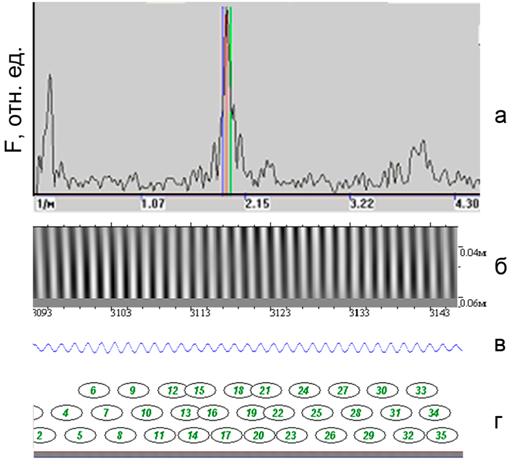
Рис. 3. Результаты фурье преобразования фрагмента радарограммы (а), результат ее горизонтальной фильтрации (б) с отражательной способностью (в) и подсчетом пройденных шпал (г).
Очевидно, что при данной процедуре обработки радиолокационной информации для определения числа пройденных трасс может использоваться первая процедура. Однако, задача определения числа пройденных шпал в единицу времени может решаться вычислением отношения числа шпал на метр пути (k) к частоте главного максимума спектра ![]() .
.
Оценим требуемую производительность радиолокационного оборудования при данной процедуре подсчета числа пройденных шпал. Обозначим v- скорость движения подвижного состава. Частота (f) прохождения шпалы под антенным блоком допускает оценку:![]() (6)
(6)
Тогда, в соответствии с теоремой Котельникова [4] при l=10, производительность локатора должна приближаться к m=1200 трасс/с.
В работе исследована точность определения ![]() как функция протяженности пути, учтенного при выполнении процедуры горизонтальной фильтрации. При выполнении экспериментов использована радиолокационная аппаратура, генерирующая 150 трасс/с.
как функция протяженности пути, учтенного при выполнении процедуры горизонтальной фильтрации. При выполнении экспериментов использована радиолокационная аппаратура, генерирующая 150 трасс/с.
Результаты определения ![]() и ширины этого максимума
и ширины этого максимума ![]() у основания приведены на рисунке 4.
у основания приведены на рисунке 4.
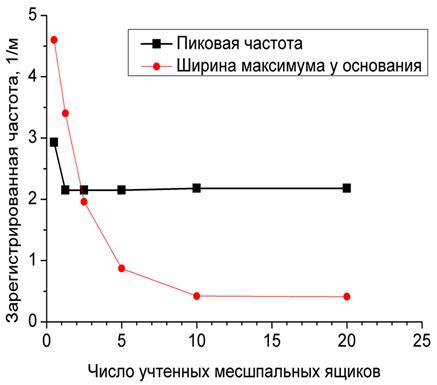
Рис. 4. Исследование спектральных характеристик относительной отражательной способности
Для определения точности вычисления ![]() при различных скоростях движения и оценок требуемой производительности радиолокационного оборудования сконструирован макет подвижного состава, состоящий из высокоточного привода и тележки с установленным радиолокационным оборудованием. При проведении экспериментов изменялась скорость движения тележки, а также размещение антенных блоков относительно верхнего строения пути. На рисунке 5 приведена зависимость скорости движения тележки, определенная через
при различных скоростях движения и оценок требуемой производительности радиолокационного оборудования сконструирован макет подвижного состава, состоящий из высокоточного привода и тележки с установленным радиолокационным оборудованием. При проведении экспериментов изменялась скорость движения тележки, а также размещение антенных блоков относительно верхнего строения пути. На рисунке 5 приведена зависимость скорости движения тележки, определенная через ![]() ,от скорости привода. Дополнительные исследования показали, что точность аппроксимирующей экспериментальные точки линейной зависимости не хуже 1% определяемой скорости. Использование данного типа радиолокационного оборудования при движении со скоростями, близкими к 100 км/час, приводит к росту ошибки в определении скорости движения подвижного состава и его позиционированию на рельсошпальной решетке до 5-10%.
,от скорости привода. Дополнительные исследования показали, что точность аппроксимирующей экспериментальные точки линейной зависимости не хуже 1% определяемой скорости. Использование данного типа радиолокационного оборудования при движении со скоростями, близкими к 100 км/час, приводит к росту ошибки в определении скорости движения подвижного состава и его позиционированию на рельсошпальной решетке до 5-10%.
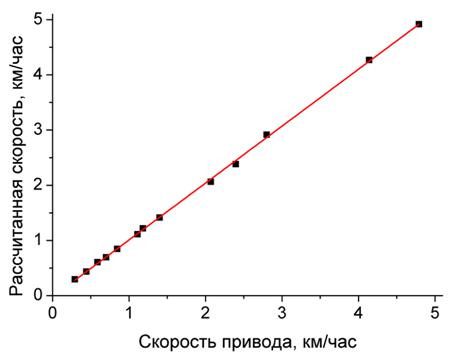
Рис.5. Сравнение скорости привода тележки и результатов расчета
Выводы
Анализируя возможности двух приведенных выше процедур подсчета числа пройденных шпал можно отметить следующие обстоятельства.
- Позиционирование подвижного состава в процессах разгона и торможения можно осуществлять используя первую процедуру, посколько в условиях изменяющейся скорости частота спектрального распределения отражательной способности станет переменной величиной
- На участках пути, где движение осуществляется с постоянной скоростью предпочтение следует отдавать второй процедуре, поскольку она менее требовательна к состоянию верхнего строения пути и типу использованных элементов скрепления.
- Использование радиолокационной аппаратуры с производительностью 150 трасс/с обеспечивает точность определения скорости движения до 1% величины при скорости движения до 5 км/час. Для обеспечения такой точности позиционирования. При движении со скоростями, близкими к 100 км/час необходимо использовать радиолокационную аппаратуру с производительностью 1200 - 1500 трасс/с.
- Созданы программы для ЭВМ, которые реализуют разработанные алгоритмы.
Работа выполнена при поддержке РФФИ, проект № 11-07-00127-а.
Литература
1. Микропроцессорные системы автоведения электроподвижного состава. Под ред. Л.А. Баранова. М., Транспорт, 1990. 270 с.
2. Проект системы контроля и управления движением поездов на сети железнодорожной компании (США) // Организация перевозок. Автоматизированные системы управления транспортом: ЭИ / ВИНИТИ. 1986. № 2.
3. Розенберг И.Н., Сазонов Н.В., Альтшулер Б.А., Самратов У.Д. Оперативный мониторинг скоростных магистралей на основе сетевого принципа дифференциального спутникового позиционирования // Геоинформационные технологии на железнодорожном транспорте, http://www.gismps.ru/index.php?option= content&task=view&id=155.
4. Бураченко Д.Л., Клюев Н.Н., Коржик В.И., Финк Л.М. и др. Общая теория связи. / Под ред. Л.М.Финка. – Л.: ВАС, 1970. – 412с.