Применение комплекса полунатурного моделирования в процессе проектирования информационно-измерительных и управляющих систем
Аннотация
Дата поступления статьи: 31.01.2014Современные тенденции развития электроники ставят перед разработчиками задачи создания все более сложных устройств за более короткие сроки. Чтобы решение данных задач не приводило к ухудшению качества продукции применяется множество различных методов автоматизации процесса проектирования. Однако автоматизация не способна существенно улучшить ситуацию в случае разработки инновационных устройств или устройств, создание которых требует множества исследований и испытаний. Для оптимизации процесса проектирования в статье предлагается применить методы аппаратно-программного и полунатурного моделирования для проведения испытаний, отладки алгоритмов работы и обработки измерительной информации. В основе этого подхода лежит разделение устройства на аппаратные и модельные блоки. В аппаратном виде реализуются только те блоки, работу которых необходимо исследовать. Остальные реализуются в виде универсальных моделей, управляемых с компьютера. Это позволяет сократить расходы на модернизацию модулей при плохих результатах испытаний, а также возможно проведение исследования нескольких алгоритмов обработки информации одновременно.
В статье обоснована актуальность применения методов аппаратно-программного и полунатурного моделирования при проектировании сложных электронных устройств, выделены основные этапы проектирования с применением данного метода, а также рассмотрен процесс проектирования информационно-измерительной и управляющей системы автоматической ориентации станции тропосферной связи и использованием предложенного подхода.Ключевые слова: Полунатурное моделирование; аппаратно-программное моделирование; проектирование электронных устройств; разработка электронных устройств.
05.11.17 - Приборы, системы и изделия медицинского назначения
В настоящее время все большее распространение получают технологии полунатурного моделирования и быстрого прототипирования. Их популярность обусловлена высокой скоростью развития электроники и жестких требований к длительности разработки новых устройств. Традиционно при разработке устройства разработчик макетировал свое изделие для оценки правильности принятых схемотехнических изделий, исследования датчиков, алгоритмов работы устройства и обработки информации, и других параметров. Однако постоянно растущая сложность устройств и используемых в них компонентов сильно снижает эффективность макетирования. Особенно сильно это проявляется при разработке инновационных устройств, при которой требуется проводить множество исследований и экспериментов. Часто даже незначительное изменение, внесенное разработчиком, вызывает необходимость изготовления нового макета, а каждый вариант алгоритма работы требует описания его на языке используемого микроконтроллера или ПЛИС. Применение технологий полунатурного моделирования и быстрого прототипирования позволяют избежать множества сложностей и существенно повысить эффективность процесса разработки [1].
Быстрое прототипирование – это метод автоматизированного создания прототипа механической части устройства по модели, описанной в специализированной CAD системе. Существуют различные варианты создания прототипов. Наиболее распространенные среди них – послойное наращивание или отверждение материала (3D принтеры), вырезание изделия на станках с ЧПУ, изготовление печатных плат фрезерованием и другие. Чаще всего прототипы используются для оценки внешнего вида (дизайн, эргономика разработанного изделия), функциональной оценки конструкции (удобство сборки, ремонтопригодность, аэродинамические характеристики) и для использования прототипа в качестве модели для производства (изготовление литейных форм по моделям).
Полунатурное моделирование представляет собой подход к исследованию устройства, реализованного в виде системы из натурных элементов, сопрягаемых с остальной частью системы, реализованной в виде модели. Создание аппаратных блоков, максимально повторяющих элементы готового изделия и управляемых моделью с компьютера, позволяют исследовать и оценить воздействие факторов, моделировать которые невозможно или нецелесообразно. Программная модель при этом позволяет исследовать множество различных алгоритмов работы и обработки информации. Часто при этом различные алгоритмы обработки информации можно исследовать параллельно, что также сильно повышает эффективность работ [2, 3].
При разработке крупных информационно-измерительных и управляющих систем целесообразно первоначально отладить взаимодействие различных блоков системы друг с другом. Для этого применяется аппаратно-программное моделирование, при котором блоки максимально реализуются в виде моделей, а реализация их взаимосвязей осуществляется при помощи специального оборудования, которое имитирует их внешние сигналы и интерфейсы.
Для реализации подобных задач фирма NationalInstrumentsпредлагает применение программных продуктов Labview и большого количества разнообразных аппаратных средств, позволяющие реализовать модели различных процессов [4, 5, 6].
При создании комплекса полунатурного моделирования одной из наиболее сложных и важных задач является определение физически реализуемых элементов. В виде моделей реализуются все элементы создаваемого устройства, кроме тех, параметры которых неизвестны и требуют исследования или тех, моделировать которые нецелесообразно. После определения блоков, реализуемых в виде моделей и устройств, требуется выбрать аппаратные и программные средства, при помощи которых данные блоки будут реализовываться, а также способы взаимодействия между ними.
На рис. 1 представлены этапы разработки устройств с использованием полунатурного моделирования [7].

Рис. 1 – Этапы разработки устройств с применением методов полунатурного моделирования
Данный подход был использован при разработке информационно-измерительной и управляющей системы автоматической ориентации станции тропосферной связи. Тропосферная связь широко использовалась в виде крупных стационарных станций до 90х годов XX века, после чего была большей частью заменена спутниковой связью, но при этом нашла свое применение в виде мобильных станций, позволяющих быстро организовать сеанс связи вне зоны покрытия других систем передачи информации. Использование мобильных станций тропосферной связи создало новую проблему быстрого и точного наведения антенны станции на ответный антенный пост [8].
Разрабатываемая система автоматической ориентации станции тропосферной связи представляет собой автоматическое дистанционно управляемое опорно-поворотное устройство, обеспечивающее поворот антенны на ответный антенный пост для обеспечения максимального уровня приема и передачи радиосигнала. В основе построения системы лежит модульный принцип, при котором она разделена на отдельные функциональные модули, подключаемые друг к другу для решения конкретных задач. В состав данной системы входят управляющий блок, блок управления двигателями, датчик угла поворота, инклинометр, GNSS приемники, концевые датчики, лазерный дальномер и другие. Все блоки соединены друг с другом сетью на основе интерфейса RS-485 с использованием протокола MODBUSRTU. Данный подход позволяет пользователю самому выбрать необходимые блоки в зависимости от поставленных задач. Поворот по двум осям: азимут и угол места осуществляется при помощи актуаторов, управляемых посредством ШИМ модуляции микроконтроллером блока управления приводами. Определение положения станции в пространстве заключается в определении точных координат на местности, ее текущей ориентации по азимуту и углу места. Для вычисления необходимого поворота используются различные методы и реализующие их блоки, например, блоки GNSS приемников, дальномер и другие. Кроме этого для обеспечения приема и передачи информации требуется выравнивание станции относительно горизонта, для чего предусмотрен блок с МЭМС инклинометром или акселерометром [9].
Структурная схема станции тропосферной связи представлена на рис. 2.
Рис. 2 – Структурная схема станции тропосферной связи
Первое, что требуется сделать после сборки станции – это выровнять ее относительно горизонта для оптимального приема поляризованных волн. Для этого предусмотрен блок, содержащий акселерометр или инклинометр. Одновременно с этим при наличии GNSS приемников происходит поиск навигационных спутников и обновление альманаха [10].
Определение положения в пространстве и ориентации может осуществляться разными способами:
- При наличии двух блоков с геодезическими GNSS приемниками, закрепленных с разных сторон антенны,после приема навигационного сигнала блок управления производит расчет координат станции и ее направления по разнице показаний блоков;
- При наличии блока определения азимута по разнице фаз GNSS сигналов, данный блок сразу после подключения к навигационным спутникам выдает данные о местоположении и азимуте станции;
- При наличии блока дальномера, необходимо, путем поворота станции с пульта, произвести наведение дальномера последовательно на два ориентира с известными координатами (ориентиром может быть GPS приемник стандартной точности, либо любой объект, координаты которого можно определить по карте). Рекомендуемое минимальное расстояние между ориентирами можно определить, исходя из точности определенных координат ориентиров по формуле (1):
![]() ,(1)
,(1)
где L – минимальное расстояние между ориентирами для обеспечения
нахождения сигнала ответной антенны, м;
d – абсолютная погрешность определения координат ориентиров, м;
α – требуемая точность угла наведения антенны (обычно принимается за 1-2о).
После определения положения антенны, блок управления запрашивает данные о положении ответной антенны у оператора, производит расчет необходимого поворота антенны и производит первоначальное наведение.
При достаточной точности измерения положения антенны и данных о ответной антенне, приемник должен выдать управляющему блоку информацию о нахождении сигнала от ответной антенны. Если этого не произошло, запускается алгоритм поиска сигнала вокруг найденного положения.
Поиск сигнала осуществляется путем перемещения антенны по различным траекториям вокруг найденного положения с определением уровня принимаемого сигнала. Как только найден сигнал ответной антенны, сканирование пространства для поиска сигнала прекращается и управление передается алгоритму поиска главного максимума диаграммы направленности для обеспечения максимального уровня сигнала. Поиск главного максимума проводится аналогично поиску сигнала, но алгоритмы перемещения зависят от изменения уровня принимаемого сигнала [11].
После завершения сеанса связи, производится разворот станции в начальное положение для демонтажа и упаковки.
Обобщенный алгоритм работы станции представлен на рис. 3.
Рис. 3 – Обобщенный алгоритм работы станции тропосферной связи
Кроме перечисленных выше алгоритмов, в устройстве необходимо реализовать операции калибровки концевых датчиков, датчика угла поворота, акселерометра, инклинометра и дальномера.
Первоначально в аппаратном виде были реализованы блоки актуаторов для взаимодействия с опорно-поворотным устройством станции. Остальные блоки были выполнены в виде моделей в среде аппаратно-программного моделирования Labview. Подобное моделирование позволило отработать алгоритмы управления опорно-поворотным устройством и взаимосвязи между различными блоками. При последующей аппаратной реализации различных блоков, они заменяют соответствующие модельные блоки, что позволяет проверять все функции и алгоритмы работы системы не зависимо от набора аппаратных блоков.
Так как одним из основных требований, предъявляемых к тропосферной станции является время развертывания и вхождения в связь, для исследования и оптимизации алгоритмов поиска сигнала и главного максимума диаграммы направленности была создана дополнительная модель, имитирующая выдаваемую информацию об уровне принимаемого сигнала при различных положениях антенн управляемой и ответной станций по измеренным диаграмме направленности и другим параметрам антенны. Программа, реализующая модель позволяет загрузить различные алгоритмы поиска сигнала, после чего производит оценку эффективности каждого алгоритма методом статистических испытаний по случайно задаваемым начальным условиям. Интерфейс программы представлен на рис. 4.
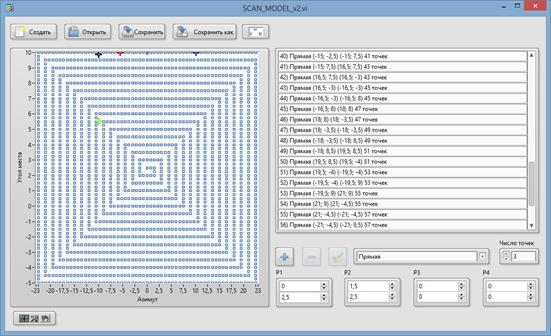
Рис. 4 – Интерфейс программы для исследования алгоритмов поиска сигнала и главного максимума диаграммы направленности
На данный момент разработка находится на этапе проведения обозначенных выше исследований и испытаний созданных моделей.
Литература:
- Using system engineering techniques to accelerate your next project / M. Torgerson e. a. // Embedded. – 2013. – Режимдоступа: http://www.embedded.com/design/prototyping-and-development/4422991/2/Using-system-engineering-techniques-to-accelerate-your-next-project (датаобращения 10.12.2013).
- Gomez, M. Hardware-in-the-Loop Simulation / M. Gomez // Embedded. – 2001. –Режим доступа: http://www.embedded.com/design/prototyping-and-development/4024865/Hardware-in-the-Loop-Simulation (датаобращения 14.12.2013).
- Городов, Д. И. Имитационное моделирование отдельных задач ЭМС в среде “LabVIEW” / Д. И. Городов, С. В. Касаткин, А. П. Евсеев // Труды (восьмой) научной конференции по радиофизике, посвященной 80-летию со дня рождения Б. Н. Гершмана / ред. А. В. Якимов. - Нижний Новгород: ТАЛАМ, 2004. – С. 265-266.
- Conway, J. A Software Engineering Approach to LabVIEW / J. Conway, S. Watts. – New Jersey: Prentice Hall PTR, 2003. – 211 p. – ISBN 0-13-009365-3.
- Ashley, K. Analog Electronics with LabVIEW / K. Ashley. – New Jersey: Prentice Hall PTR, 2002. – 432 p. – ISBN 0-13-047065-1.
- Asmundis, R. LabVIEW – Modeling, Programing and Simulations / R. Asmundis. – Rijeka: InTech, 2011. – 306 p. – ISBN 978-953-307-521-1.
- Шайкин А. С., Разработка электронных устройств с использованием комплекса полунатурного моделирования / А. С. Шайкин, Е. В. Шайкина // Науковедение. – 2013. – №6 – Режим доступа: http://naukovedenie.ru/PDF/203TVN613.pdf (дата обращения 06.02.14).
- Шайкин, А. С. Разработка блока управления электроприводами для станции тропосферной связи / А. С. Шайкин // Сборник трудов XXI международного международного научно-технического семинара «Современные технологии в задачах управления, автоматики и обработки информации» – М.: Изд-во ГУП Академиздат центр «Наука» РАН, 2012. –
С. 124-125. - Шайкин, А. С. Устройство для исследования характеристик МЭМС датчиков движения и положения в пространстве / А. С. Шайкин, Е. В. Шайкина // Сборник трудов XXII международного международного научно-технического семинара «Современные технологии в задачах управления, автоматики и обработки информации» – М.: Изд-во МГУПИ, 2013. –
С. 185-186. - Мисюра, В. В. Обработка и фильтрация сигналов. Современное состояние проблемы [Электронный ресурс] / В. В. Мисюра, И. В. Мисюра // «Инженерный вестник Дона», 2013, №4. – Режим доступа http://www.ivdon.ru/magazine/archive/n4y2013/2130 (доступ свободный) – Загл. с экрана. – Яз. рус.
- Целигоров, Н. А. Математические методы неопределённостей систем управления и методы, используемые для их исследований [Электронный ресурс] / Н. А. Целигоров, Е. Н. Целигорова, Г. В. Мафура // «Инженерный вестник Дона», 2012, №4 (2 часть). – Режим доступа http://www.ivdon.ru/magazine/archive/n4p2y2012/1340 (доступ свободный)– Загл. с экрана. – Яз. рус.