Моделирование пространственных спектров на выходе векторно-скалярной приемной системы, работающей на фоне шумов моря
Аннотация
Для векторно-скалярной приемной систем предложен алгоритм обработки, который эффективно подавляет помеху, обусловленную взволнованной поверхностью моря. Алгоритм основан на теоретических и экспериментально проверенных данных о корреляционных характеристиках векторно-скалярных полей шумов моря. Для более полного и корректного описания шумов, создаваемых взволнованной поверхностью моря, используется компьютерное моделирование. В отличие от традиционного представления помех в виде изотропного шума, такой подход позволяет более полно учесть характеристики векторно-скалярных шумовых полей. Выполненное моделирование показало, что отношение сигнал/помеха на выходе векторно-скалярной антенны (по сравнению со скалярной) увеличивается более чем в 16 раз.
Ключевые слова: обработка сигналов, пространственный спектр, векторно-скалярная антенна, изотропный шум, шум морской поверхности, ковариационная матрица.05.13.18 - Математическое моделирование, численные методы и комплексы программ
Введение
Современное развитие технологии создания векторно-скалярных многокомпонентных приемников вызывает интерес к использованию векторно-скалярных антенн (ВСА) в различных прикладных задачах гидроакустики. Для ВСА предлагаются алгоритмы обработки с различным пространственным разрешением: стандартным, высоким [1] и сверхвысоким [2]. Сравнительный анализ показал ряд преимуществ ВСА по сравнению со скалярными антеннами (СА). Так, в работе [3] показано, что отношение сигнал/помеха на выходе ВСА более чем в 3 раза превышает это отношение при использовании СА, имеющей такую же апертуру. В настоящей работе предлагается алгоритм обработки сигналов для ВСА, эффективно подавляющий шум моря. Алгоритм основан на измерении потока мощности принимаемых сигналов и учитывает тот факт, что при достаточном числе осреднений поток мощности в горизонтальной плоскости по шумовой составляющей стремится к нулю [4].
При моделировании алгоритма обработки для ВСА, работающей на фоне шумов моря, требуется полное и точное представление авто- и взаимно ковариационных характеристик векторно-скалярных шумовых полей. Если скалярные характеристики шумов моря исследованы достаточно детально, то векторные характеристики шумов, обусловленных взволнованной поверхностью океана, требуют дополнительных исследований. Результаты, полученные рядом авторов, достаточно полно представлены в монографии [4]. Для безграничного полупространства получены аналитические выражения коэффициентов пространственной корреляции и соотношение мощностей на компонентах векторно-скалярного приемного модуля. Однако получить полное описание характеристик векторно-скалярных шумовых полей на основе имеющихся данных достаточно проблематично. Для этого необходимо вернуться к интегральным соотношениям, описывающим векторно-скалярные поля в волноводе, а далее либо получить аналитические выражения подобно тому, как это, например, сделано для некоторых характеристик в работе [5], либо выполнить численное интегрирование, которое в данной работе реализовано посредством компьютерного моделирования. Моделирование шумов, вызванных взволнованной морской поверхностью, позволяет рассчитать пространственные спектры на выходе приемных систем, для которых основной помехой являются шумы моря.
Модели сигнала и шума
Приемная система, которая установлена в глубоком море, представляет собой горизонтальную линейную эквидистантную антенну, состоящую из ![]() модулей. Каждый модуль состоит из приемника давления и двух ортогональных приемников колебательной скорости, оси которых расположены в горизонтальной плоскости. На рис.1 представлена геометрия модели: центр линейной антенны, расположенной параллельно оси
модулей. Каждый модуль состоит из приемника давления и двух ортогональных приемников колебательной скорости, оси которых расположены в горизонтальной плоскости. На рис.1 представлена геометрия модели: центр линейной антенны, расположенной параллельно оси ![]() на глубине
на глубине ![]() , находится в точке
, находится в точке ![]() . Местоположение шумящего источника находящегося в точке
. Местоположение шумящего источника находящегося в точке ![]() , задается координатами (
, задается координатами (![]() ), где
), где ![]() – пеленг,
– пеленг, ![]() – угол возвышения. Шумящая поверхность ограничена кругом радиуса
– угол возвышения. Шумящая поверхность ограничена кругом радиуса ![]() .
.
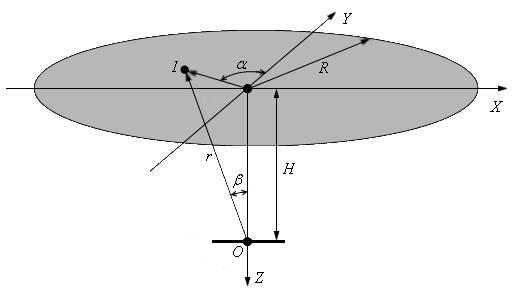
Рис.1. Геометрическая модель шумящей поверхности.
Принимаемые сигналы на ![]() -ом модуле ВСА можно представить в виде:
-ом модуле ВСА можно представить в виде:
![]() (1)
(1)
где ![]() и
и ![]() , (
, (![]() ) – звуковое давление и проекции колебательной скорости по направлениям
) – звуковое давление и проекции колебательной скорости по направлениям ![]() и
и ![]() , измеряемые
, измеряемые ![]() -ым приемным модулем. Если вектор
-ым приемным модулем. Если вектор ![]() формировать в виде
формировать в виде ![]() , то его можно записать как
, то его можно записать как
![]() (2)
(2)
где ![]() – векторы сигналов по давлению и по компонентам колебательной скорости на всей приемной антенне.
– векторы сигналов по давлению и по компонентам колебательной скорости на всей приемной антенне.
Поверхностные шумы моря, обусловленные взволнованной поверхностью, создаются совокупностью независимых источников, равномерно распределенных вблизи поверхности в пределах круга конечного диаметра [4, 5]. Амплитуда излучения одинакова для всех источников и распределена по Рэлею, а начальная фаза – случайная величина, равномерно распределенная в интервале значений ![]() . Мнимые и действительные части сигналов таких источников распределены по Гауссу. Характеристика направленности источников шума в вертикальной плоскости имеет вид
. Мнимые и действительные части сигналов таких источников распределены по Гауссу. Характеристика направленности источников шума в вертикальной плоскости имеет вид
![]() . (3)
. (3)
Звуковое давление, создаваемое единичным источником, записывается в виде
![]() . (4)
. (4)
Компоненты колебательные скорости для точечного источника с угловыми координатами ![]() и
и ![]() в эквивалентных единицах звукового давления имеют вид
в эквивалентных единицах звукового давления имеют вид
![]() ,
,![]() , (5)
, (5)
который справедлив практически при любых условиях распространения сигнала в волноводе [4]. При моделировании сигнала полагалось, что источники шума являются диполями, а локальный источник - монополь, т.е. в выражении (3) ![]() и
и ![]() соответственно.
соответственно.
Для гауссовых сигналов и шумов с нулевым математическим ожиданием статистика измерений полностью определяется матрицей ковариаций, которая рассчитывается для заданной модели сигналов и помех как ![]() . Матрица ковариаций для вектора
. Матрица ковариаций для вектора ![]() , соответствующего фиксированной частоте, представляет собой сумму матрицы сигналов от локальных источников –
, соответствующего фиксированной частоте, представляет собой сумму матрицы сигналов от локальных источников – ![]() и матрицы помех –
и матрицы помех – ![]()
![]() (4)
(4)
В отличие от традиционного представления матрицы помех в виде ![]() (
(![]() - единичная матрица), что соответствует пространственно-некоррелированным шумам, в данной работе для более полного описания шумов моря используется компьютерное моделирование. Тестирование результатов моделирования векторно-скалярной шумовой составляющей показало совпадение с теоретическими характеристиками поля помех [4]. Так, средние значения элементов ковариационной матрицы равны
- единичная матрица), что соответствует пространственно-некоррелированным шумам, в данной работе для более полного описания шумов моря используется компьютерное моделирование. Тестирование результатов моделирования векторно-скалярной шумовой составляющей показало совпадение с теоретическими характеристиками поля помех [4]. Так, средние значения элементов ковариационной матрицы равны
 . (5)
. (5)
Откуда следует, что мощности на горизонтальных компонентах колебательной скорости в 4 раза меньше мощности давления. Ортогональные компоненты колебательной скорости не коррелированны между собой, не коррелированны также сигналы на приемнике давления и горизонтальных компонентах колебательной скорости. Но это не означает, что измеряемый поток акустической мощности шума ![]() в горизонтальной плоскости равен нулю. Обнуляется средний уровень шума, а измеряемая величина определяется дисперсией потока [4]
в горизонтальной плоскости равен нулю. Обнуляется средний уровень шума, а измеряемая величина определяется дисперсией потока [4]
![]() , (6)
, (6)
где ![]() определяет частотную полосу и время наблюдения.
определяет частотную полосу и время наблюдения.
Рассчитанные коэффициенты пространственной корреляции для скалярного поля на линейной антенне также совпали с известными зависимостями для модели шумового поля Крона-Шермана [6], имеющими вид
![]() ; (7)
; (7)
где ![]() – функция Бесселя первого порядка,
– функция Бесселя первого порядка, ![]() – расстояние между приемными элементами. Также получено совпадение с аналитическими зависимостями для векторных компонент поля [5]:
– расстояние между приемными элементами. Также получено совпадение с аналитическими зависимостями для векторных компонент поля [5]:
![]() , (8)
, (8)
![]() . (9)
. (9)
Данные соотношения справедливы при горизонтальном расположении приемной антенны вдоль оси Х.
Алгоритм обработки
Пространственный спектр на выходе СА при обработке сигналов методом, имеющим стандартное разрешение (метод Бартлетта) рассчитывается следующим образом:
![]() , (10)
, (10)
здесь ![]() – сканирующий вектор,
– сканирующий вектор, ![]() – вектор координат, по которым выполняется фокусировка в пространственной области. При работе в дальней зоне вектор
– вектор координат, по которым выполняется фокусировка в пространственной области. При работе в дальней зоне вектор ![]() является вектором задержек, обеспечивающим обзор антенны в фиксированном направлении по пеленгу и углу возвышения,
является вектором задержек, обеспечивающим обзор антенны в фиксированном направлении по пеленгу и углу возвышения, ![]() – спектрально-корреляционная матрица принимаемых сигналов (4).
– спектрально-корреляционная матрица принимаемых сигналов (4).
В ряде работ [1, 7] пространственного спектра по методу Бартлетта при использовании ВСА предлагается рассчитывать следующим образом
![]() . (11)
. (11)
Сканирующие векторы для СА и ВСА, соответственно, имеют вид:
![]() ,
, ![]() .
.
В данной работе в отличие от традиционно используемых алгоритмов для ВСА (11) предлагается метод обработки, имеющий вид:
![]() (12)
(12)
здесь ![]() – пространственный спектр с использованием векторных приемников, измеряющих градиент давления. Электронное вращение на ортогональных векторных приемниках обеспечивается комбинацией
– пространственный спектр с использованием векторных приемников, измеряющих градиент давления. Электронное вращение на ортогональных векторных приемниках обеспечивается комбинацией ![]() , таким образом, чтобы направление результирующего вектора
, таким образом, чтобы направление результирующего вектора ![]() совпадало с направлением, формируемым по скалярным элементам
совпадало с направлением, формируемым по скалярным элементам
![]() . (13)
. (13)
Величина ![]() является потоком акустической мощности, поэтому метод (12) назовем методом, работающим по потоку мощности.
является потоком акустической мощности, поэтому метод (12) назовем методом, работающим по потоку мощности.
Результаты моделирования
В этом разделе приводятся результаты моделирования пространственных спектров по методу Бартлетта на выходе СА (10), ВСА (11), а также по потоку мощности (12). На рис.2 представлены пространственные спектры, когда на вход приемной антенны поступают сигналы, обусловленные только шумами моря. Нормировка пространственных спектров выполнена на среднюю мощность сигнала на входе одиночного модуля. Антенна расположена горизонтально в глубоком море, число приемных модулей равно 20, межэлементное расстояние равно ![]() , средняя рабочая частота
, средняя рабочая частота ![]() Гц.
Гц.
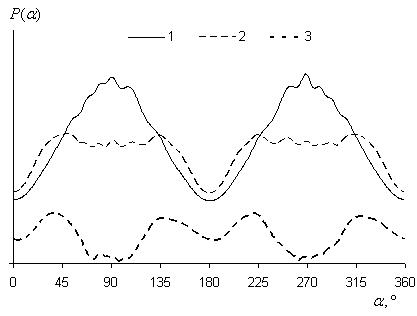
Рис.2. Пространственные спектры на выходе СА и ВСА, обусловленные шумами моря:
1 – для СА, 2 – для ВСА, 3 – для ВСА при формировании отклика по потоку мощности.
Выходной отклик для СА (кривая 1) имеет ярко выраженные максимумы и минимумы. Минимальный уровень шума принимается по направлениям близким к ![]() . Это объясняется тем, что лепесток, сформированный в этом направлении, захватывает достаточно удаленную область морской поверхности, на которой расположены шумящие источники. Максимальный уровень шумов наблюдается по направлениям, близким к
. Это объясняется тем, что лепесток, сформированный в этом направлении, захватывает достаточно удаленную область морской поверхности, на которой расположены шумящие источники. Максимальный уровень шумов наблюдается по направлениям, близким к ![]() . В данном случае в силу пространственной симметрии формируемый главный лепесток захватывает не только траверсные направлении в горизонтальной плоскости, но и поверхность моря «над головой» антенны. Кривая 2 соответствует пространственному спектру при использовании ВСА. Поскольку диаграмма направленности горизонтально расположенных векторных приемников обращена к морской поверхности нулем, то при групповой обработке сигналов по направлениям
. В данном случае в силу пространственной симметрии формируемый главный лепесток захватывает не только траверсные направлении в горизонтальной плоскости, но и поверхность моря «над головой» антенны. Кривая 2 соответствует пространственному спектру при использовании ВСА. Поскольку диаграмма направленности горизонтально расположенных векторных приемников обращена к морской поверхности нулем, то при групповой обработке сигналов по направлениям ![]() уровень принимаемых шумов несколько уменьшается по сравнению с СА. Кривая 3 соответствует алгоритму обработки (12). Видно, что использование такого подхода приводит к эффективному подавлению шумов моря при конечном значении
уровень принимаемых шумов несколько уменьшается по сравнению с СА. Кривая 3 соответствует алгоритму обработки (12). Видно, что использование такого подхода приводит к эффективному подавлению шумов моря при конечном значении ![]() . В данном примере
. В данном примере ![]() =1000, что вполне реализуемо для многих прикладных задач гидроакустики.
=1000, что вполне реализуемо для многих прикладных задач гидроакустики.
На рис.3 представлены аналогичные пространственные отклики для ситуации, когда входные сигналы определяются не только шумами моря, но и локальным источником, находящимся под углом ![]() . Нормировка для каждого из рассчитанных пространственных спектров выполнена на его максимальное значение.
. Нормировка для каждого из рассчитанных пространственных спектров выполнена на его максимальное значение.
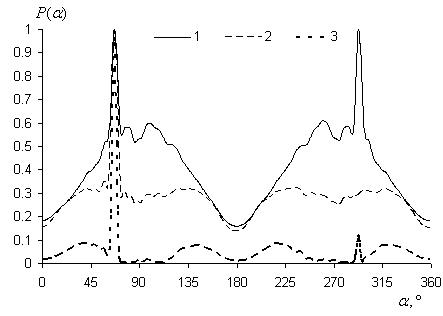
Рис3. Пространственные спектры на выходе СА и ВСА, обусловленные шумами моря и сигналом от локального источника: 1- для СА, 2 – для ВСА, 3 – для ВСА при формировании отклика по потоку мощности.
Поскольку линейная СА не различает «право-лево», то для неё получен известный результат: в выходном отклике на фоне шумов наблюдается два лепестка единичного уровня. В пространственном спектре ВСА ложный боковой лепесток подавлен, шумовой фон немного ниже, чем в пространственном спектре для СА, особенно по направлениям близким к 90˚ и 270˚. Пространственный спектр той же ВСА, но с использованием алгоритма по потоку мощности (12), также подавляет ложный боковой лепесток от локального источника, а самое главное, эффективно подавляет шумы моря.
Для характеристики помехоустойчивости алгоритмов обработки используется отношение сигнал/помеха на выходе приемной системы:
![]() ,
,
здесь ![]() – значение выходного сигнала, когда на вход поступает сигнал только от локального источника,
– значение выходного сигнала, когда на вход поступает сигнал только от локального источника, ![]() – значение выходного сигнала, обусловленное только шумом.
– значение выходного сигнала, обусловленное только шумом.
С учетом того, что принимаемые сигналы имеют нормальное распределение, шум аддитивен, а входные сигналы подвергаются линейному преобразованию, данное выражение преобразуется к виду
![]() .
.
Средние значения, а также и ![]() были найдены путем моделирования и статистического осреднения для каждого из рассматриваемых алгоритмов. Как видно из рис.3, значение
были найдены путем моделирования и статистического осреднения для каждого из рассматриваемых алгоритмов. Как видно из рис.3, значение ![]() зависит от угла фокусировки –
зависит от угла фокусировки – ![]() для всех рассмотренных алгоритмов, следовательно и отношение сигнал/помеха на выходе также зависит от углового положения источника. Для ситуации, представленной на рис.3 (
для всех рассмотренных алгоритмов, следовательно и отношение сигнал/помеха на выходе также зависит от углового положения источника. Для ситуации, представленной на рис.3 (![]() ), получены следующие значения отношения сигнал/помеха на выходе приемной антенны: для СА
), получены следующие значения отношения сигнал/помеха на выходе приемной антенны: для СА ![]() =52, для ВСА
=52, для ВСА ![]() =68, а для алгоритма, работающего по потоку мощности,
=68, а для алгоритма, работающего по потоку мощности, ![]() =800. В данной ситуации предложенный алгоритм (по критерию отношения сигнал/помеха на выходе приемной системы) эффективнее традиционного алгоритма для скалярной антенны в 16 раз.
=800. В данной ситуации предложенный алгоритм (по критерию отношения сигнал/помеха на выходе приемной системы) эффективнее традиционного алгоритма для скалярной антенны в 16 раз.
Заключение
Разработан алгоритм, который использует поток мощности сигналов, принимаемых векторно-скалярной антенной. Предложенный алгоритм эффективно подавляет шумы моря за счет того, что среднее значение потока мощности в горизонтальной плоскости по шумовой составляющей стремится к нулю. Компьютерное моделирование показало, что даже при конечном времени наблюдения и ограниченной полосе частот (![]() =1000) разработанный алгоритм обработки эффективно подавляет шумовую составляющую на выходе пространственного спектра векторно-скалярной антенны.
=1000) разработанный алгоритм обработки эффективно подавляет шумовую составляющую на выходе пространственного спектра векторно-скалярной антенны.
Анализ пространственных спектров показал существенные преимущества предложенного алгоритма для векторно-скалярной антенны: отношение сигнал/помеха на выходе приемной системы увеличено в 16 раз по сравнению со скалярной приемной системой.
Как следствие столь эффективного подавления шумов правомерно предположить, что рабочие характеристики векторно-скалярной приемной системы, использующей предложенный алгоритм обработки, будут намного лучше, чем у скалярной антенны, что позволит обнаруживать малошумные источники на бóльших расстояниях и с бóльшей точностью.
Литература
- 1.Hawkes M., Nehorai A. Acoustic vector-sensor beamforming and Capon direction estimation // IEEE Transactions on Signal Processing. Sep. 1998. V. 46. № 9. P. 2291–2304.
2.Wong K.T., Zoltowski M.D. Self-initiating MUSIC-based direction finding in underwater acoustic particle velocity-field beamspace // IEEE Journal of Oceanic Engineering. Apr. 2000. V. 25. № 2. P. 262–273.
3.А.В. Аверьянов, Г.М. Глебова, Г.Н. Кузнецов, Точность оценки параметров локального источника векторно-скалярными антеннами // Сборник трудов XXII сессии РАО и Сессии Научного совета РАН по акустике. Т. 2. - М.: Геос, 2010, С. 332-335.
4.Гордиенко В.А. Векторно-фазовые методы в акустике. М.: Физматлит, 2007. 480 с.
5.Захаров Л.Н., Киршов В.А., Рожин Ф.В. Пространственно-корреляционные функции компонент колебательной скорости для двух моделей звукового поля // Акуст. журн. 1972. Т. 18. №1. С. 49-52)
6.B.F. Cron, C.H. Sherman, “Spatial-correlation function for various noise models,” J. Acoust. Soc. Am., vol. 34, 1962, pp. 1732.
7.Glebova G.M., Kuznetsov G.N. “Estimating parameters of signal sources and characteristics of noise field by using spatially separated vector-scalar modules,” The Formation of Acoustical Fields in Oceanic Waveguides, Reconstruction of Inhomogeneities in Shallow Water, Nizhny Novgorod: Inst. Appl. Phys. 1998. V. 1. P. 109.