Структурно-алгоритмическая организация автопилота робота-вертолета
Аннотация
В статье предлагается структурно–алгоритмическая реализация автопилота робота-вертолета одновинтовой схемы. Автопилот рассматривается как многоуровневая система, приводится его архитектура. Приводится алгоритм функционирования ядра автопилота, который обеспечивает работу алгоритмов управления и алгоритмов функционирования системы. Рассматривается структура автопилота. В задаче управления применяется позиционно–траекторный подход.
Ключевые слова: робототехника, система управления, аэродинамика, вертолет, автопилот, регулятор, алгоритм, архитектура.
Введение
Вертолеты – это летательные аппараты (ЛА) вертикального взлета, способные решать широкий круг задач, функционировать на режимах, недоступных для других типов ЛА. Однако роботизация может повысить техническую значимость вертолетов. Робот-вертолет, является автоматическим устройством с антропоморфным действием, которое частично или полностью заменяет человека при выполнении работ в опасных для жизни условиях, при относительной недоступности объекта или для другого использования. Роботизированные вертолеты могут выполнять задачи мониторинга, видеонаблюдения, картографирования, транспортировки грузов в условиях опасных для жизни пилота, монтажа и строительства, и т.д.
Поэтому на сегодня актуальна задача разработки автопилота робота-вертолета. Сегодня автопилоты роботов-вертолетов не решают в полной мере задачи: автоматического взлета и посадки, посадки на авторотации, движения по заданной траектории с высокой точностью [1]. Остается нерешенной задача отслеживания произвольной физически реализуемой траектории для робота–вертолета. Эти задачи могут быть решены на основе результатов изложенных в [2-4].
В данной работе предлагается структурно–алгоритмическая организация автопилота робота–вертолета одновинтовой схемы.
К автопилоту робота-вертолета (РВ) предъявляется ряд основных требований к его структурной и алгоритмической реализации: надежность, возможность модификации, простота, функционирование в режимах взлета/посадки, движения по заданной траектории, зависания в точке, выполнение требований по точности и быстродействию.
Робот–вертолет должен реализовать задачи планирования, управления движением вдоль спланированных траекторий, управление исполнительными механизмами. В этой связи целесообразно применять иерархическую структуру. Прежде всего, следует определиться с иерархией системы.
Архитектура автопилота
Архитектура автопилота представлена тремя уровнями (рис. 1). На первом уровне реализованы алгоритмы управления [2]. На этом уровне задаются параметры полета, цели, производится выбор алгоритмов управления и их настроечных параметров.
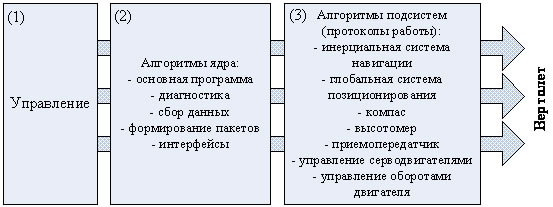
Рис. 1. Архитектура автопилота
На втором уровне представлены алгоритмы основной программы, автопилота. Основная подпрограмма является ядром системы и обеспечивает функционирование, обработку данных, вычисление необходимых управляющих воздействий. Второй уровень является наиболее универсальным, т.к. не привязан к аппаратному обеспечению подсистем и исполнительных механизмов.
На третьем уровне выделены алгоритмы подсистем автопилота, к которым отнесены: блок датчиков и блок связи, блок распределения. В первую очередь блок распределения реализует функции распределения сигналов, поступающих от основной программы и приемника ручного управления, отдавая приоритет последнему. В случае программного сбоя или отказа бортового компьютера, управление РВ перейдет к оператору. Кроме того, на уровне (3) происходит интерпретация команд положения исполнительных механизмов от уровня (2) и перевод в аналоговые управляющие сигналы. Блок распределения жестко привязан к типу серводвигателей/основного двигателя.
Блок-схема алгоритма функционирования ядра автопилота приведена на рис. 2. Алгоритм функционирования ядра достаточно прост. После включения автопилота запускается инициализация вычислительного модуля, определяется режим работы, проводится диагностика, установка соединения с наземной станцией. По завершению информация регистрируется, если отклонений в работе не выявлено, то запускается основная программа. Основная программа и регистрация событий работают параллельно до выключения устройства. В основной программе происходит сбор данных о внешних возмущениях, формируется пакет команд управления и пересылается на вход платы распределения.
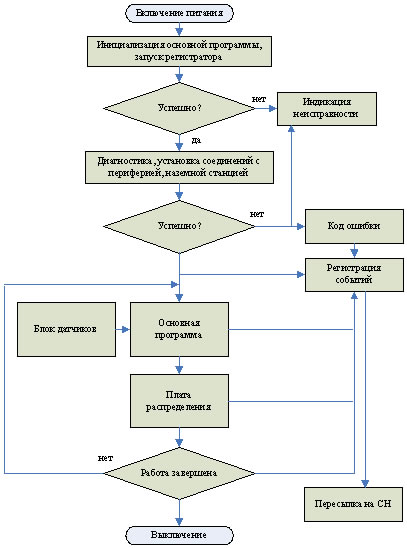
Рис. 2. Алгоритм функционирования ядра автопилота
Структура системы управления робота–вертолета на базе разрабатываемого автопилота представлена на рис. 3.
Система начинает функционировать с выбора параметров внешней среды [Аср], которые зависят от конкретной ситуации. Выбор параметров [Аср] производится на основе заданной модели внешней среды и показаний датчиков.
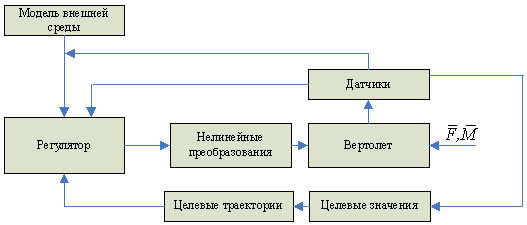
Рис. 3. Структура системы управления робота–вертолета
Регулятор вырабатывает управляющие силы и моменты в зависимости от текущих внешних и внутренних координат, их производных, целевых значений траектории и режима движения по это траектории. В регуляторе находится блок наблюдателя внешних неучтенных возмущений![]() . В регуляторе задается модель движения вертолета [2]:
. В регуляторе задается модель движения вертолета [2]:
![]()
![]() ,
,![]() .
.
На выходе регулятора формируется вектор управляющих сил и моментов:
![]()
Вектор поступает на вход блока нелинейных преобразований. В данном блоке происходит переход от сил и моментов к координатам отклонений органов управления (![]() угол установки общего шага несущего винта,
угол установки общего шага несущего винта, ![]() углы циклического шага,
углы циклического шага, ![]() число оборотов на двигателе,
число оборотов на двигателе, ![]() общий шаг рулевого винта).
общий шаг рулевого винта). ![]()
![]()
Затем сформированный вектор координат проходит ЦАП преобразование на плате распределения и выводится на исполнительные механизмы вертолета в виде ШИМ сигнала.
На вертолет со стороны внешней среды действуют внешние неуправляемые силы и моменты![]() , динамики
, динамики![]() и неучтенные в модели внешние возмущения
и неучтенные в модели внешние возмущения![]() .
.
Датчики фиксируют внешние ![]() и внутренние координаты
и внутренние координаты![]() , и их производные
, и их производные![]() .
.
По информации, поступающей с датчиков, формируется вектор состояний, который затем возвращается на вход блока выбора параметров и блок регулятора. Приведенный алгоритм управления располагается в теле общего цикла основной программы, блок которой находится в алгоритме функционирования ядра системы автопилота [6].
Выводы
Представленная структурно–алгоритмическая организация успешно реализована в программе симуляции, в задачах численного моделирования полета вертолета [7]. В программе промоделированы режимы полета робота–вертолета. На рис. 4 приведены: траектория движения по эллипсу и режим посадки по- вертолетному.
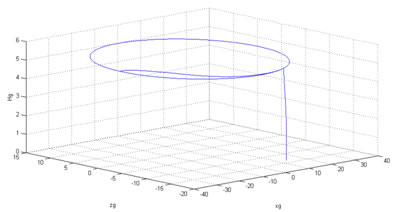
Рис. 4. Движение робота–вертолета по эллиптической траектории и посадка
Результаты моделирования подтвердили эффективность разрабатываемого автопилота.
Заключение
Автопилот, соответствующий представленной структурной схеме, может быть установлен на мини-вертолеты одновинтовой схемы 60, 80 классов, на промышленные мини-вертолеты. Рассмотренная структурно–алгоритмическая организация допускает модификацию автопилота, в перспективе возможно создание роботов на базе полноразмерных одновинтовых вертолетов.
Литература
1.Saripalli, S. Roberts, J.M. Corke, P.I. Buskey, G. Sukhatme, G.S. A tale of two helicopters, Intelligent Robots and Systems, 2003. (IROS 2003). Proceedings. 2003 IEEE/RSJ International Conference on 27-31 Oct. 2003
2.Пшихопов В.Х. Управление подвижными объектами в априори неформализованных средах// Известия ЮФУ. Технические науки. Тематический выпуск «Перспективные системы управления». – Таганрог: Изд-во: ТТИ ЮФУ, 2008, №12. – С. 6-20.
3. Пшихопов В.Х. Аттракторы и репеллеры в конструировании систем управления подвижными объектами// Известия Таганрогского государственного радиотехнического университета. 2006. Т. 58. № 3. С. 49-57.
4. Пшихопов В.Х., Медведев М.Ю., Сиротенко М.Ю., Э Носко О., Юрченко А.С. Проектирование систем управления роботизированных воздухоплавательных комплексов на базе дирижаблей. Известия Таганрогского государственного радиотехнического университета. 2006. Т. 58. № 3. С. 160-167.
5.Пшихопов В.Х., Медведев М.Ю. Синтез адаптивных систем управления летательными аппаратами// Известия Южного федерального университета. Технические науки. 2010. Т. 104. № 3. С. 187-196.
6. Кульченко А.Е., Федоренко Р.В. Структурно-алгоритмическая организация системы управления БПЛА на базе мини-вертолета // Перспективные системы и задачи управления: материалы Пятой Всероссийской научно-практической конференции. – Таганрог: Изд-во ТТИ ЮФУ, 2010 –С. 135-139.
7. Кульченко А.Е. «Программно – аппаратный моделирующий комплекс для робота – вертолета» //«Известия Кабардино-Балкарского научного центра РАН» (в печати)